
01 · Research focus
Modeling physical worlds across space, modality, and time.
01
Spatial Intelligence
Learning structured 3D/4D representations for scenes, agents, motion, and geometry in dynamic physical environments.
02
Multimodal Foundation Model
Connecting vision, language, temporal signals, and spatial context for generalizable physical-world understanding.
03
World Model
Modeling how scenes evolve, how agents move, and how actions may change the physical world.
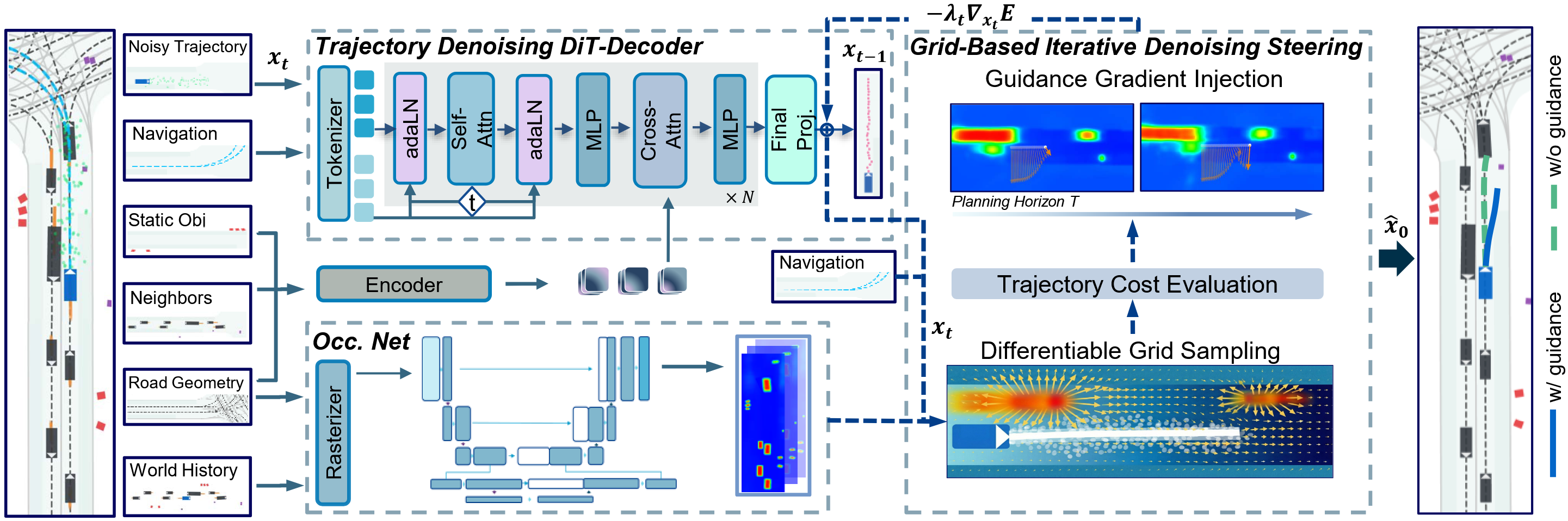
| Jul 12, 2026 | Two papers, G2DP: Diffusion Planning with Spatio-Temporal Grid Guidance and Shift & Drift: A Zero-Shot Benchmark for Generalizable and Robust Autonomous Driving Motion Planning, are accepted by IROS 2026. 🎉 |
|---|---|
| Feb 26, 2026 | Our SpaceDrive: Infusing Spatial Awareness into VLM-based Autonomous Driving paper is accepted by CVPR 2026. 🎉 The 1st ranking on nuScenes benchmark and 2nd best close-loop performance on Bench2Drive leaderboard! |
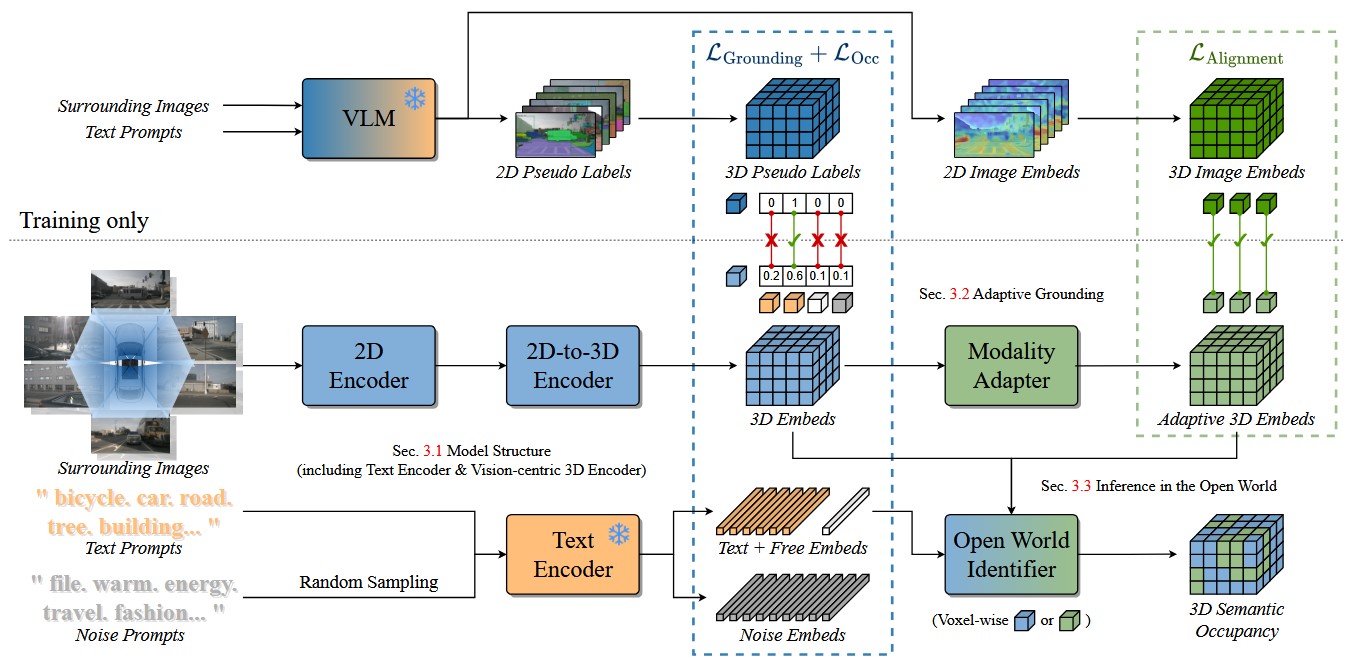
| Jun 25, 2025 | Our AGO: Adaptive Grounding for Open World 3D Occupancy Prediction paper is accepted by ICCV 2025. 🎉 |
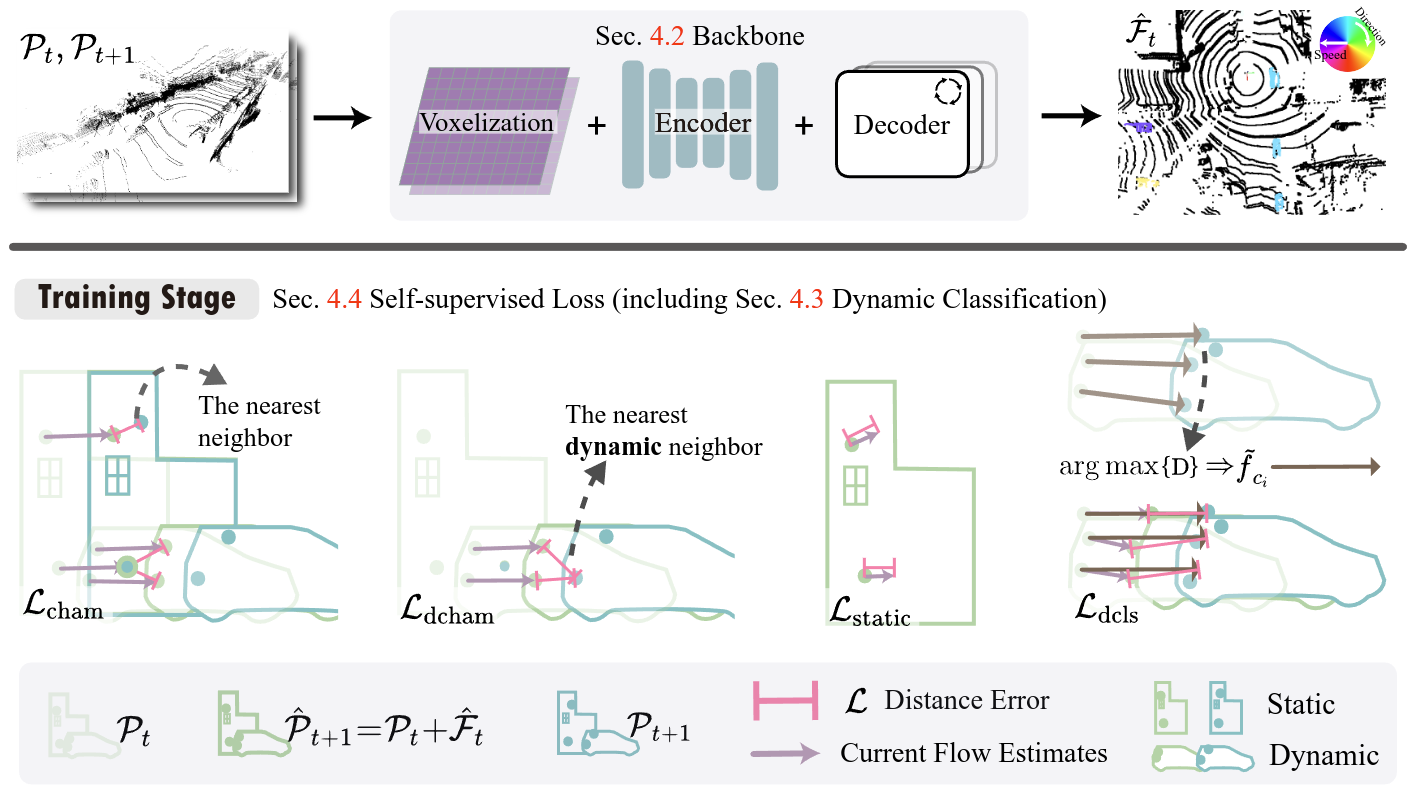
| Jul 01, 2024 | Our SeFlow: A Self-Supervised Scene Flow Method in Autonomous Driving paper is accepted by ECCV 2024. 🎉 The 1st ranking on Argoverse 2 Self-supervised scene flow leaderboard! |
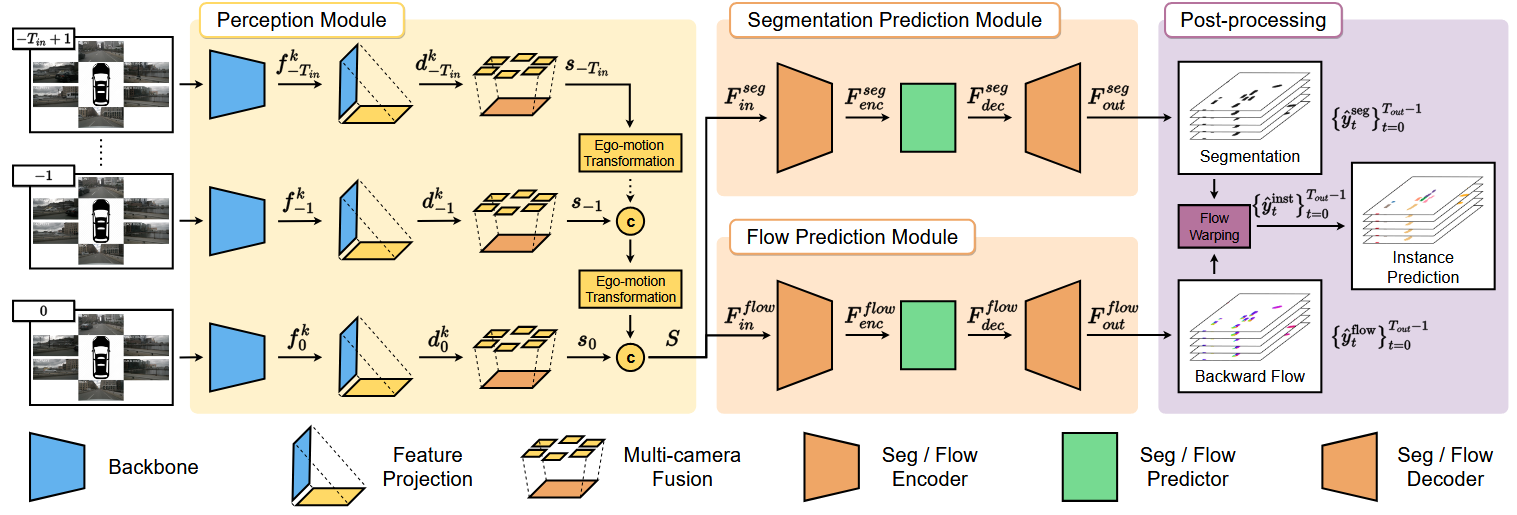
| Apr 19, 2023 | PowerBEV, our paper on camera-based end-to-end instance prediction in bird’s-eye view, has been accepted by IJCAI 2023. 🎉 |
03 · Publications
Publication highlights
- CVPR 2026
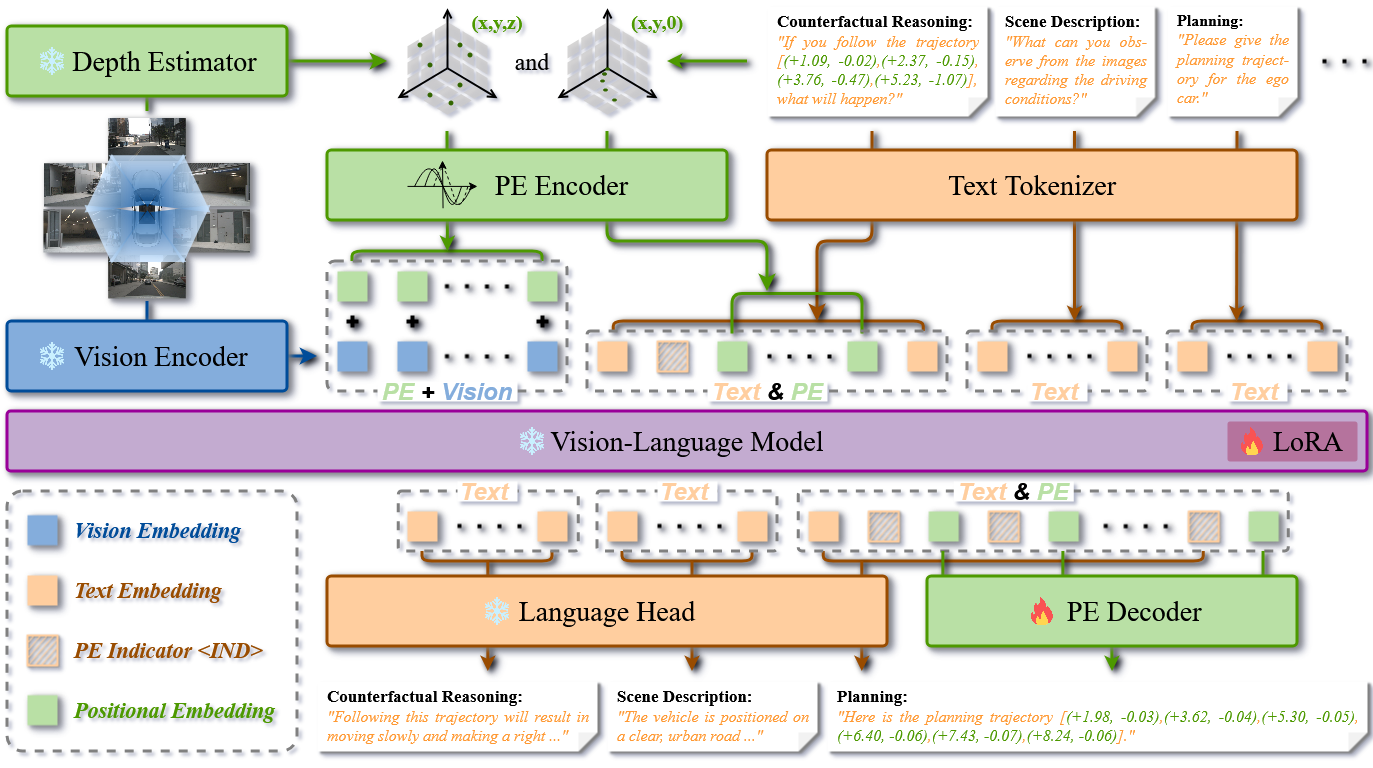 SpaceDrive: Infusing Spatial Awareness into VLM-based Autonomous DrivingInfusing explicit spatial representations into vision-language models for robust autonomous driving with 3D spatial reasoning.IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2026
SpaceDrive: Infusing Spatial Awareness into VLM-based Autonomous DrivingInfusing explicit spatial representations into vision-language models for robust autonomous driving with 3D spatial reasoning.IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2026
- IROS 2026
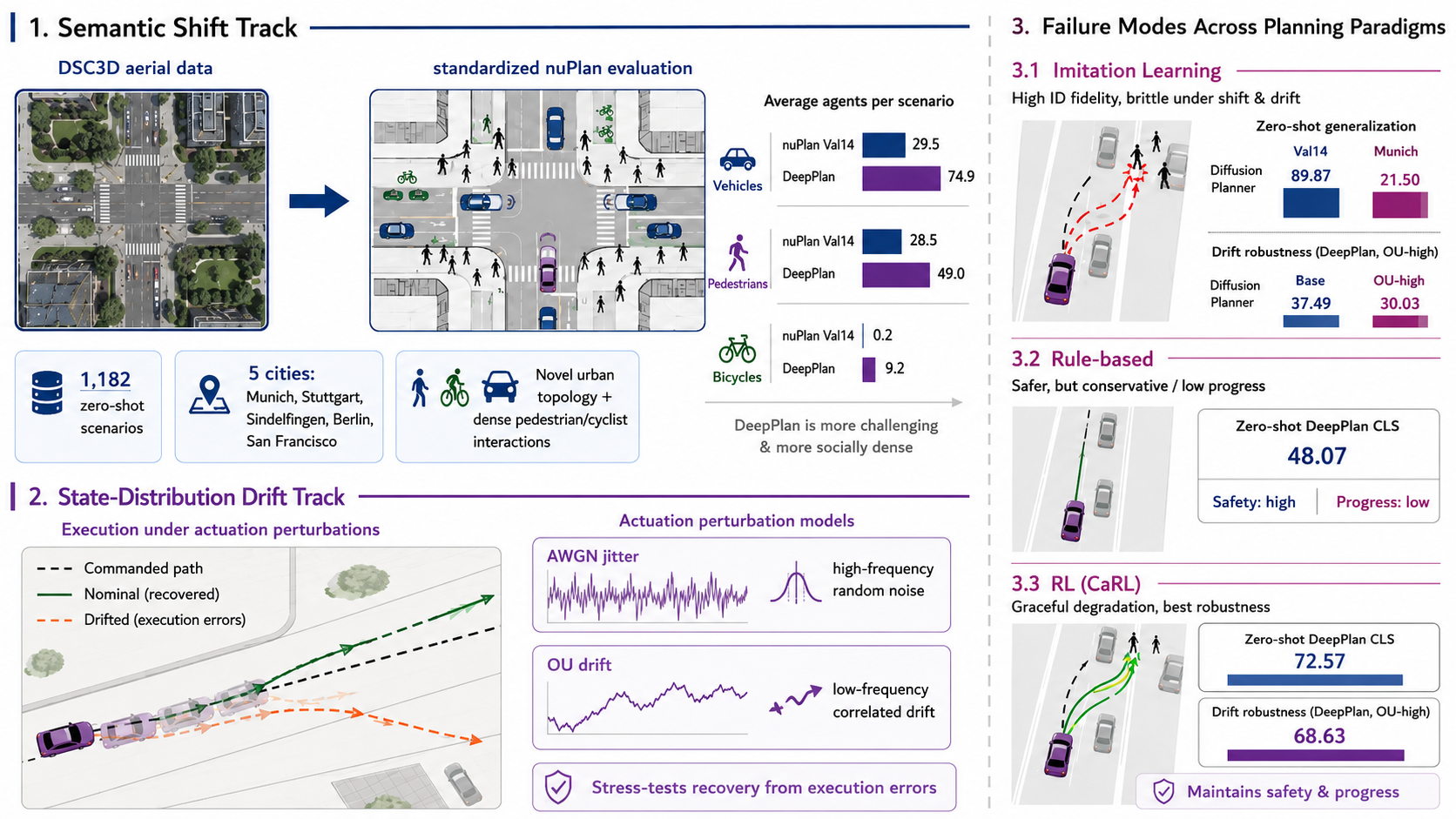 Shift & Drift: A Zero-Shot Benchmark for Generalizable and Robust Autonomous Driving Motion PlanningZero-shot dual-track benchmark stress-testing motion planners under semantic shift and state-distribution drift in closed-loop driving.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
Shift & Drift: A Zero-Shot Benchmark for Generalizable and Robust Autonomous Driving Motion PlanningZero-shot dual-track benchmark stress-testing motion planners under semantic shift and state-distribution drift in closed-loop driving.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
04 · Writing
Research notes
| Dec 24, 2025 | SpaceDrive:Infusing Spatial Awareness into VLM-based Autonomous Driving |
|---|---|
| Dec 15, 2025 | In the Perspective of Manifold Hypotheses - 2 |
| Nov 25, 2025 | In the Perspective of Manifold Hypotheses - 1 |
05 · Contact & positions