Peizheng Li
Ph.D. student | Machine Learning, Vision, Robotics and Autonomous Driving

Hey there! This is Peizheng Li, a PhD student with the Scene Understanding Group at Mercedes-Benz R&D, as well as the Cognitive Systems Group at University of Tübingen, where I am advised by Prof. Andreas Geiger and Prof. Andreas Zell.
Previously I was a master’s student majoring in Electromobility at the University of Stuttgart, where I completed my research thesis at the Institute of Signal Processing and System Theory, supervised by Prof. Bin Yang. Before that, I received my undergraduate degree in Automotive Studies at Tongji University.
Currently my research interests lie in the intersection of machine learning, computer vision and robotics. In particular, I am dedicated to developing autonomous systems for real-life open world scenarios through VLM/VLA and world models.
news
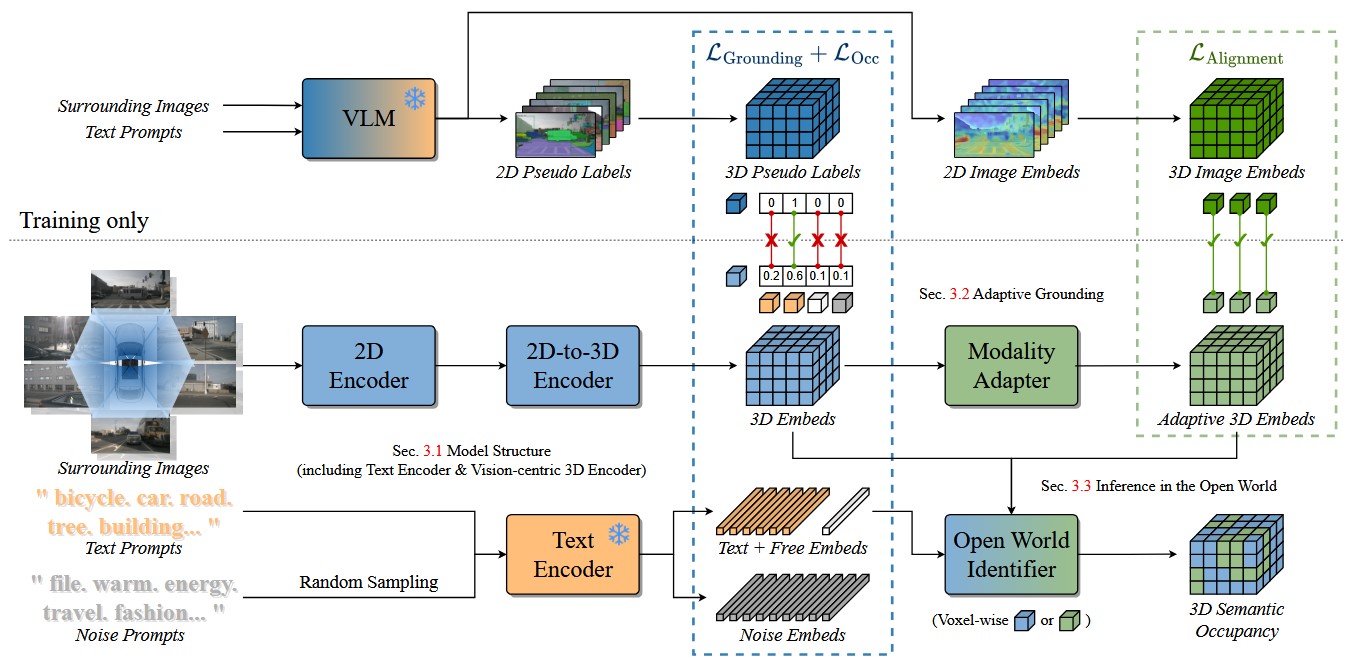
| Jun 25, 2025 | Our AGO: Adaptive Grounding for Open World 3D Occupancy Prediction paper is accepted by ICCV 2025. 🎉 |
|---|---|
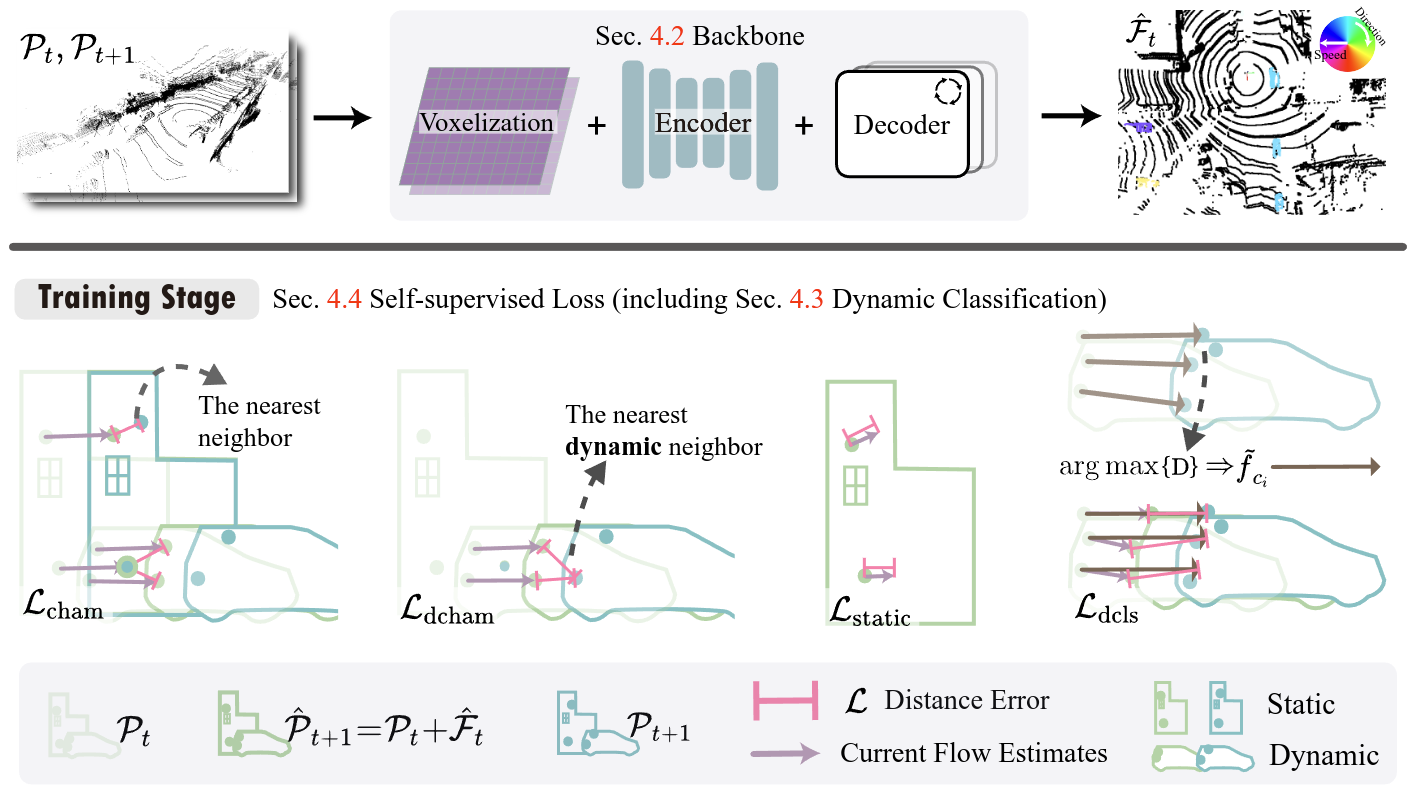
| Jul 01, 2024 | Our SeFlow: A Self-Supervised Scene Flow Method in Autonomous Driving paper is accepted by ECCV 2024. 🎉 The 1st ranking on Argoverse 2 Self-supervised scene flow leaderboard! |
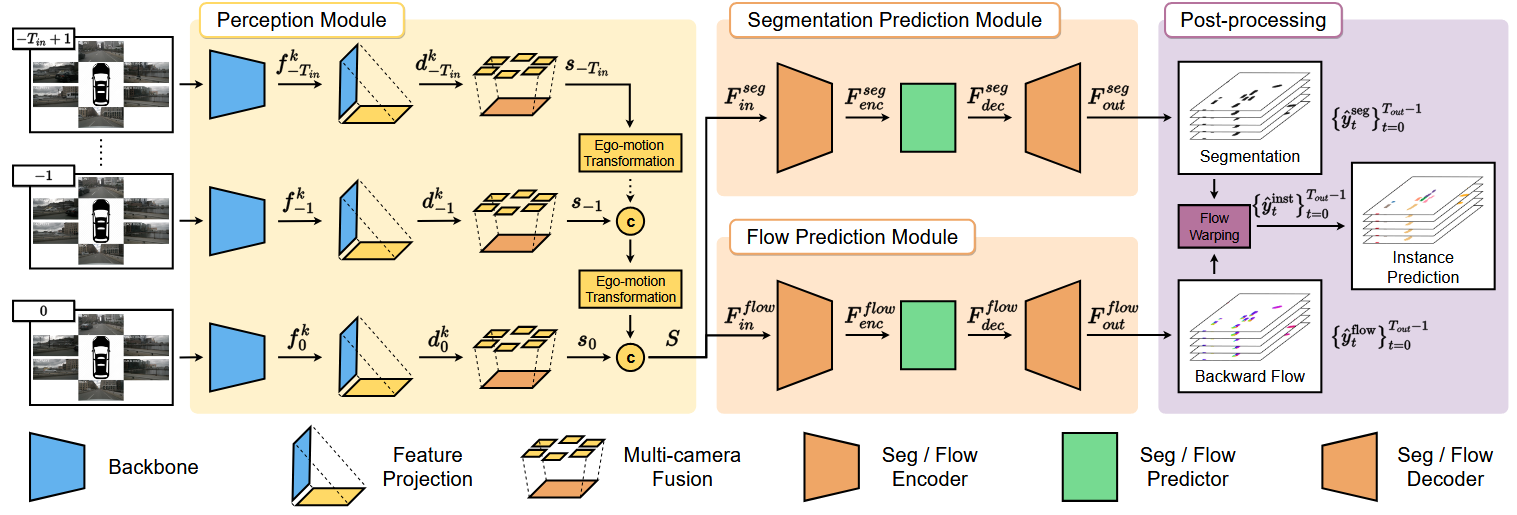
| Aug 07, 2023 | I will be presenting PowerBEV at ROAD++: The Second Workshop & Challenge on Event Detection for Situation Awareness in Autonomous Driving @ ICCV 2023. Looking forward to meeting you. |
| Apr 19, 2023 | PowerBEV, Our paper on camera-based end-to-end instance prediction in bird’s-eye view, has been accepted by IJCAI 2023. 🎉 |